

 联系我们
联系我们

参照P4点, 用 LIN命令示教P6点:分别参照P3点、 P2点、 Pl点, 用PTP命令分别示教P7点、 P8点、 pg点;用PTP命令回归HOME点所示, 完成机器人从卸料区抓取工件过程。
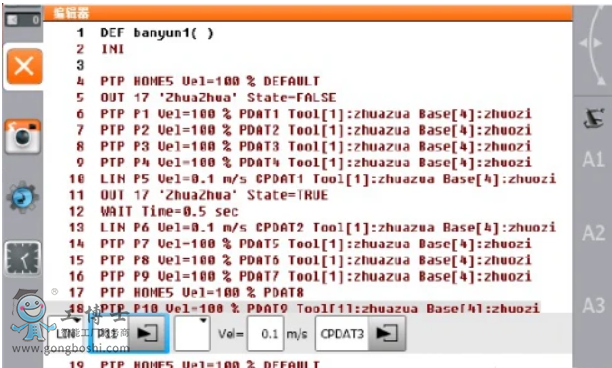
(2 )示教:P10点
手动操作机器人移动到P10点, 将光标移至第16行, 点击示教界面左下角【指令】【运动】【PTP】,添加指令PTP,点击示教界面右下面角【OK】软键完成P10点示教

(3 )示教:P11点
手动操作机器人移动到P11点,将光标移至第18行, 点击示教界面左下角【指令】【运动】【LIN】,添加指令LIN,修改速度为0.1m/s,点击示教界面右下面角【OK】软键完成P11点示教
(4)示教1/0:气爪打开
添加OUT指令, 将气爪打开, 工件放置于堆垛区指定地点
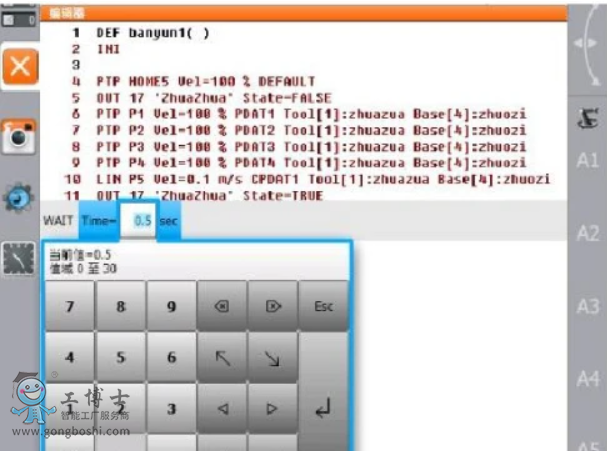
(5)示教等待
为确保气爪可靠打开, 添加WAIT延时指令。
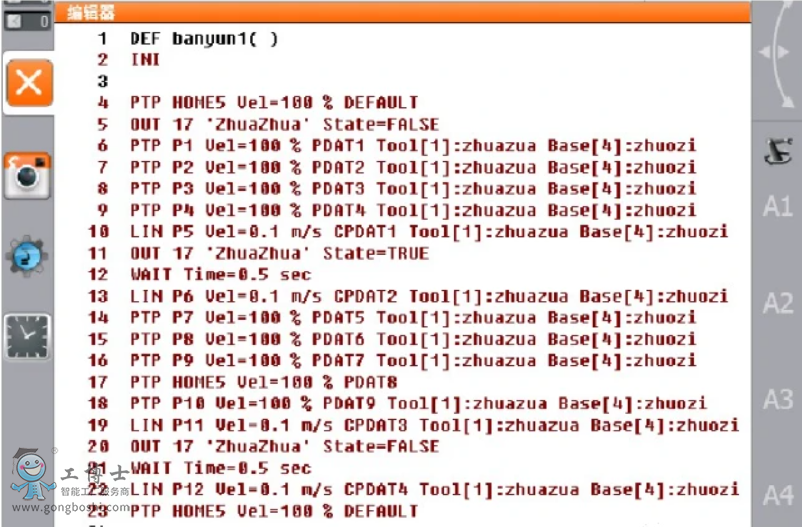
(6)示教:P12点, HOME
参照P10点, 用 LIN命令示教P12点:用 PTP命令回归HOME点, 完成机器人从堆垛区放置工件过程, 完成搬运任务。
示教完成之后, 参考程序如图所示。
- 下一篇:库卡机器人使用说明
- 上一篇:库卡两大指令CAST_TO和CAST_FROM介绍